Dispositivos de Input/Output
A principal característica de um microcontrolador é o fato de que ele conta com periféricos para input/output direto no chip, junto com o microprocessador. Note que, para um microprocessador convencional, é costumeiro que esse tipo de interface fique em uma placa que comumente chamamos de placa mãe Note que, para um microprocessador convencional, é costumeiro que esse tipo de interface fique em uma placa que comumente chamamos de placa mãe. A figura 20.01 mostra um diagrama de blocos de uma placa mão típica.

Note que a CPU está separada dos dispositivos periféricos por dois componentes. Um deles, chamado de North Bridge é responsável pela interface com componentes de alta performance (GPU, Memória). Já a South Bridge é responsável pela interface com componentes de baixo throughput, como dispositivos SATA, IDE, USB e Ethernet. Essa divisão já não é mais tão comum, visto que parte do que faz a north bridge foi incorporada nas CPUs modernas para que fosse possível utilizar estratégias como Direct Memory Access. Hoje em dia fala-se apenas no chipset da placa mãe, que é uma junção de algumas das tarefas da north bridge e todas as tarefas da south bridge.
Como um ponto de comparação, a figura 20.02 apresenta um diagrama de blocos do microcontrolador ESP32.
Note que a memória ROM do dispositivo assim como todos os periféricos que o chip usa estão diretamente no microcircuito. Essa é a diferença entre microcontroladores e microprocessadores. O motivo dessa diferença é que, para microcontroladores, faz sentido tentar entregar o processador e todos os seus periféricos no menor espaço possível. Essa restrição não é tão comum nos computadores pessoais, que tipicamente optam por um sistema maior, porém expansível e mais customizável.
Vamos começar a série de exercícios dessa seção? Na figura 20.02 aparecem alguns blocos que seriam interessantes você conhecer um pouco melhor. Sendo assim, pesquise e descreva sucintamente os seguintes periféricos:
- RTC and low power system
- SPI
- I2C
- UART
- CAN
- PWM
- DAC
- SAR ADC
A seguir, vamos olhar com mais carinho para os dispositivos externos em si.
1. Dispositivos externos e sua interface
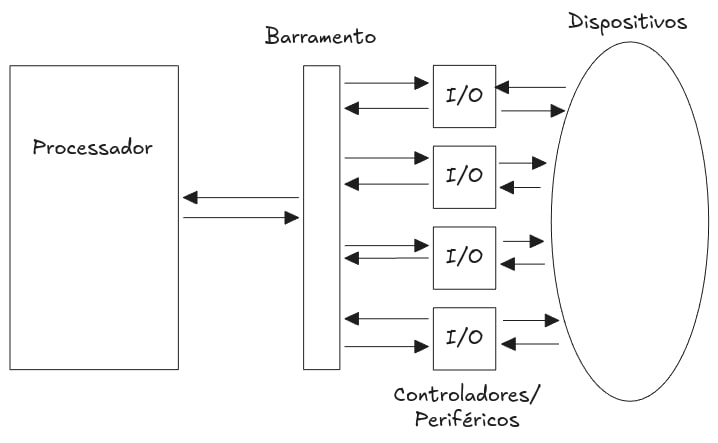
Os dispositivos externos de um processador não costumam ter acesso direto ao barramento. O motivo disso? A diversidade dos dispositivos. Tem dispositivos que se comunicam de formas completamente distintas e com protocolos diferentes. A solução? Utilizar dispositivos de controle intermediários para interface com dispositivos externos. Esses dispositivos são conhecidos como periféricos ou módulos de I/O. A figura 20.03 mostra a interface entre a CPU e os dispositivos externos.
Não é particularmente interessante, portanto, olhar para o processador ou para os dispositivos em si. Para nosso estudo, é justo olhar de maneira mais detalhada para os módulos de I/O. A figura 20.04 mostra um diagrama de blocos de um módulo típico.
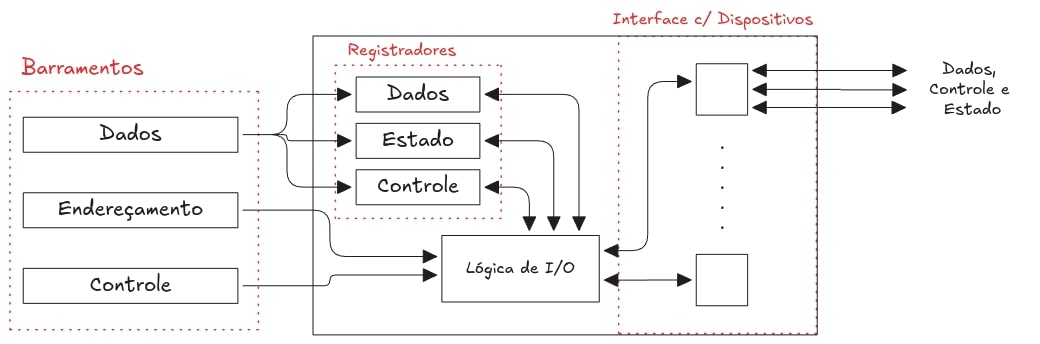
Aqui é interessante notar que esses módulos se comunicam diretamente com os barramentos da CPU e possuem registradores que se comunicam internamente com um circuito de lógica. Qual a lógica desse circuito? Varia completamente de acordo com o protocolo utilizado pelo tipo de dispositivo para o qual este módulo faz a interface.
Para entender melhor as peculiaridades de cada tipo de periférico, pesquise sobre os seguintes protocolos, todos muito comuns para computadores modernos:
- SATA
- PCI
- PCI-Express
A seguir, vamos falar sobre o assunto que talvez tenha a maior importância no trato de periféricos; as formas de interação entre módulo de I/O e CPU.
2. Tipos de acesso a periféricos
A diversidade de periféricos disponíveis para processadores é imensa. Com eles, há uma variação da maneira como a CPU interage com este tipo de dispositivo. A seguir, vamos falar sobre as três principais maneiras como a CPU pode interagir com o dispositivo de I/O.
2.1. I/O Programada
A primeira forma é a mais simples, porém também a mais limitada. A CPU é responsável por enviar um pedido de informação ao periférico, que deve coletar a informação e entregá-la no barramento de dados da CPU.
Por quê esse tipo de acesso é limitado? Tempo perdido. A CPU tipicamente é muito mais rápida que os periféricos com os quais interage. O efeito disso é que a CPU faz um pedido ao dispositivo e tem que ficar esperando, sem fazer operação alguma, até que a informação esteja disponível no seu barramento.
Pesquise três protocolos de periféricos para microprocessadores ou microcontroladores que utilizem essa forma de comunicação.
2.2. Interrupção
A interrupção é a inversão do processo descrito na seção anterior. A CPU não precisa enviar um pedido para o módulo de I/O. Ao invés, o módulo utiliza um sinal especial para alertar à CPU a disponibilidade de uma nova mensagem para ser consumida. Esse sinal especial é chamado de interrupção.
A figura 20.05 exibe um fluxograma de execução de uma CPU com a adição de um fluxo de interrupção, que é verificado sempre ao final de cada ciclo de execução.
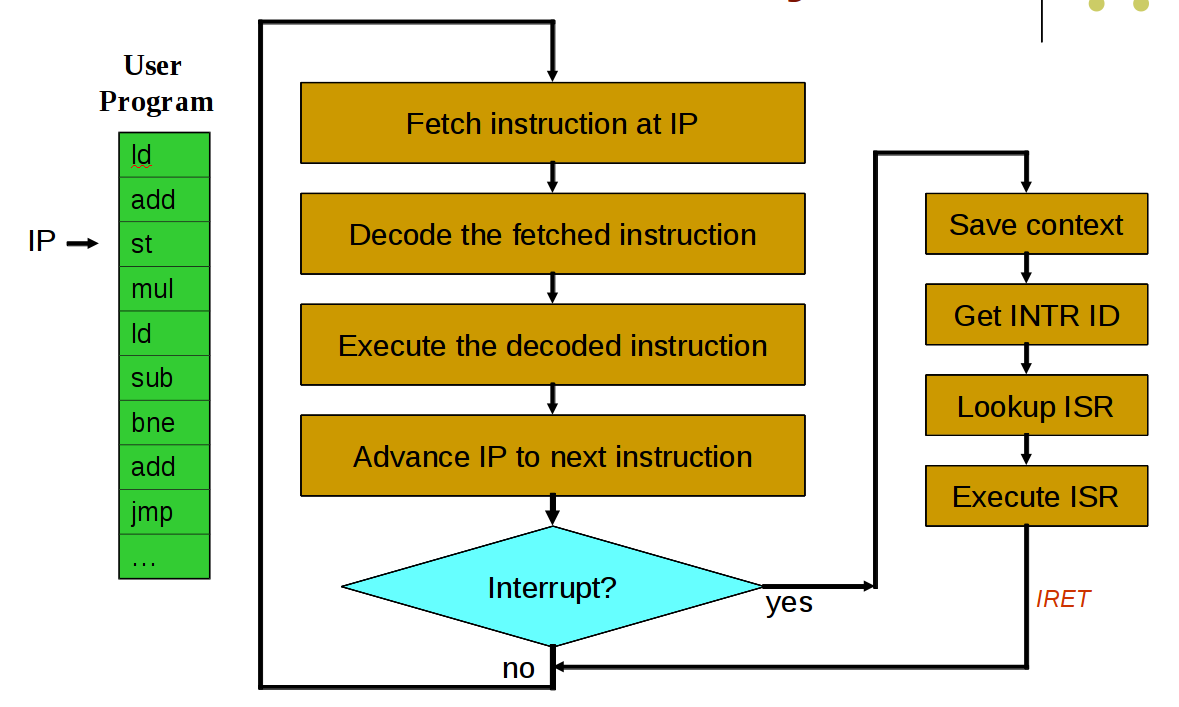
Quando uma interrupção é chamada, tipicamente as seguintes ações são executadas:
- O módulo de I/O envia um sinal de interrupção ao processador.
- O processador finaliza a instrução atual e verifica a existência do flag de interrupção.
- O processador envia um sinal de Acknowledgment da interrupção, o que permite o módulo de I/O resetar o flag.
- O processador guarda em seu stack de controle o valor atual do program counter e o valor de um registrador chamado de program status word, que guarda o estado de todos os componentes internos da CPU.
- O processador atualiza o program counter com o endereço relacionado à rotina de interrupção que precisa ser executada.
- O processador salva toda a informação de contexto da instrução atual.
- O processador executa até o fim as instruções descritas na rotina de interrupção.
- O processador restaura a informação de contexto da instrução que estava executando.
- São restaurados os valores dos registradores PC e PSW.
- Por fim, o processador continua a executar as instruções de onde estava antes da interrupção.
Note que os itens de 6 a 8 acontecem em nível de software e não de hardware.
Apesar de ser bem melhor que o acesso direto por I/O programada, o acesso por interrupção também não é ideal. Esse processo de troca de contexto do processador é lento ainda há um gargalo de processamento por conta da velocidade do periférico.
Pesquise ao menos dois protocolos de periféricos que utilizam interrupção
2.2.1. Lidando com múltiplas interrupções
A figura 20.06 mostra os pinos de um ESP-WROOM-32 que podem ser utilizados em modo de interrupção.
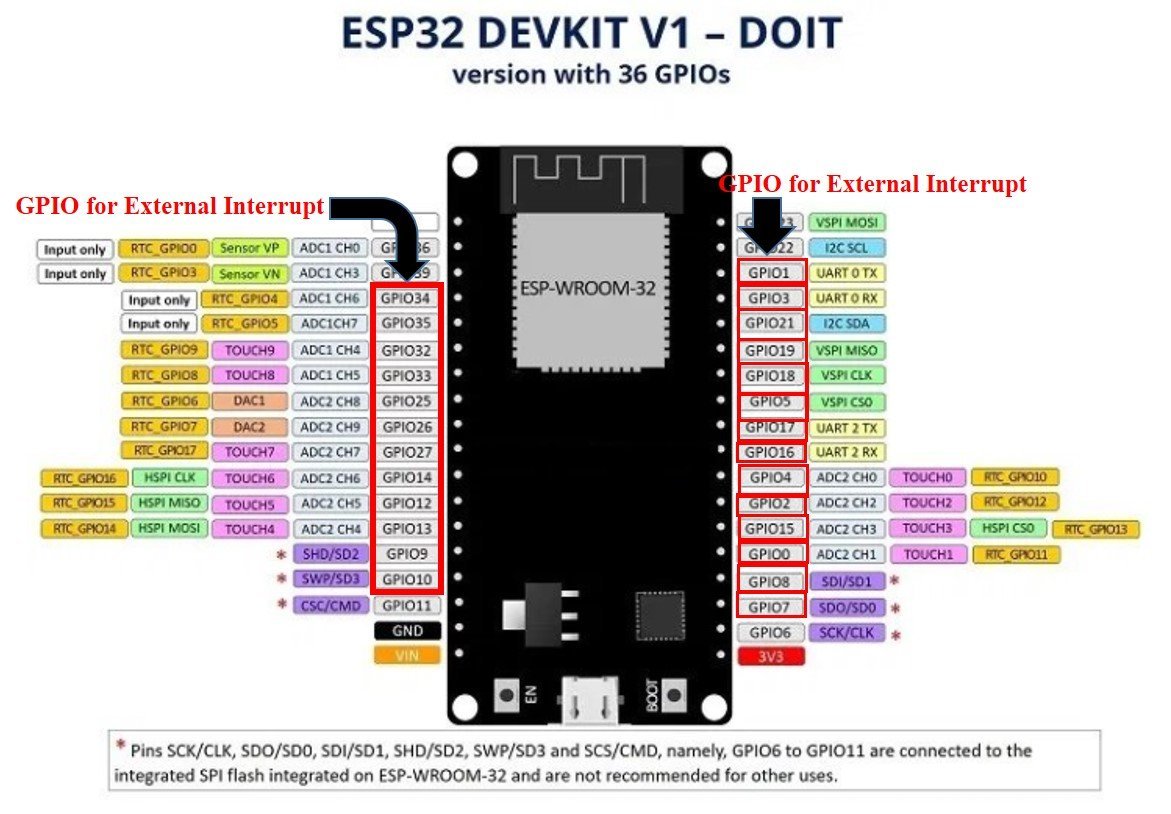
Notou algo? São muitos pinos. O que isso significa? Que existe a possibilidade de um processador receber vários sinais de interrupt ao mesmo tempo. A primeira coisa que posso dizer a respeito disso é evite deixar acontecer esse tipo de situação. A segunda é: existem formas de tratar isso.
Forma 1 - Múltiplas linhas de interrupção
Essa é a forma mais simples de lidar com o problema. Muitas interrupções? Aumente a quantidade de linhas de interrupção. Simples, né? Mas limitado. A figura 20.06 mostra uma situação onde há mais de 10 interrupções. É inviável para um processador ter tantas linhas de interrupção. Entra então a forma 2.
Forma 2 - Verificação por software
Aqui, o processador recebe o flag de interrupção e usa o barramento de dados para questionar cada periférico se foi ele que gerou o sinal de interrupção. Essa forma é obviamente mais lenta, mas não depende de múltiplas linhas de barramento e tem uma escalabilidade decente.
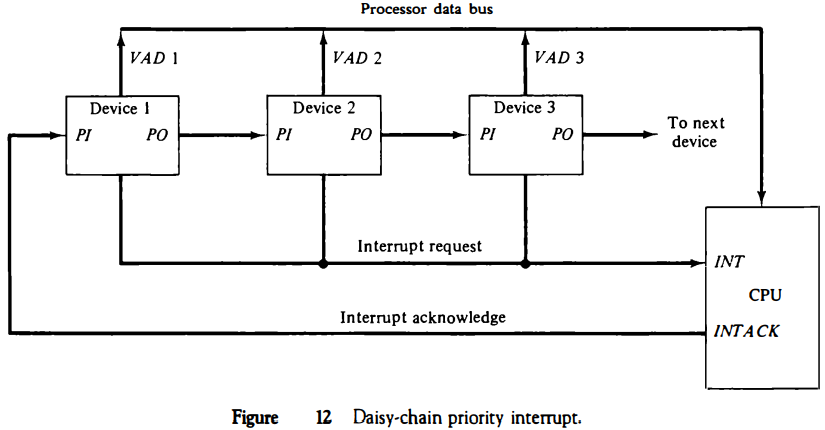
Forma 3 - Daisy chain
Similar à verificação por software, a verificação por daisy chain envolve o processador receber um sinal de interrupção e questionar os periféricos com a finalidade de encontrar a origem do sinal. A diferença? Em vez de mandar n sinais, endereçando um dispositivo de cada vez, o processador manda apenas um sinal, diretamente para um dispositivo mestre. Este dispositivo é responsável por encaminhar esse sinal para os outros periféricos em série. Quando o periférico responsável pelo sinal de interrupção é alcançado, ele envia seu endereço no barramento de dados da CPU. A figura 20.07 mostra a configuração de periféricos necessária para utilizar essa forma.
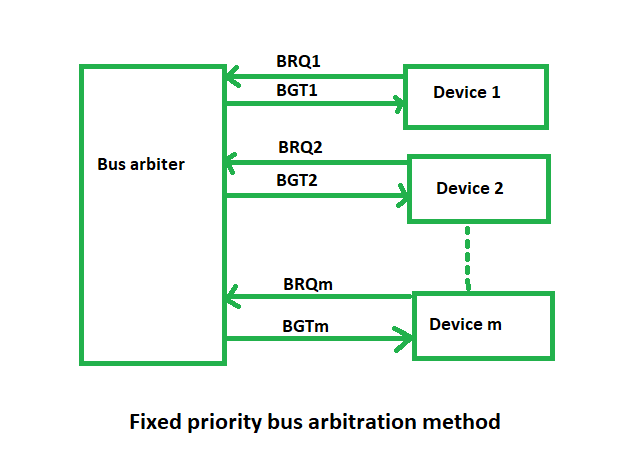
Forma 4 - Arbitração de barramento
O método de arbitração de barramento envolve conceder ao dispositivo periférico o controle do barramento. Sendo assim, não é mais papel da CPU descobrir a origem do sinal, mas apenas consumir os dados no barramento, agora monopolizado pelo dispositivo que requisitou controle. Esse é o melhor método no sentido de velocidade de acesso, porém ele necessita de um circuito especializado para arbitrar essa requisição de controle dos periféricos. A figura 20.08 mostra um exemplo da interação entre os dispositivos periféricos e o circuito de controle de arbitração.
Sua tarefa agora é criar um blink tunado. Como? Você vai utilizar dois push buttons para aumentar ou diminuir a taxa com a qual o led liga ou desliga. Quando apertar um push button, o delay do blink aumenta. De maneira análoga, o outro botão deve ter o efeito de diminuir o delay do blink.
Condição necessária: tanto o código para aumentar o delay quanto o código para diminuir o delay devem ser executados em uma ISR - Interrupt Service Routine. Isso significa que os botões serão configurados como interrupções externas.
A princípio, faça essa aplicação utilizando o Tinker CAD e a plataforma Arduino.
Repita o exercício anterior, mas dessa vez utilize o ESP32 sem utilizar a plataforma Arduino.
2.3. Direct Memory Access
De longe a melhor forma de um periférico interagir com um sistema computacional é enviando diretamente as informações externas para a memória. Essa forma de interação é chamada de acesso direto à memória.
Esse acesso tipicamente ocorre com o auxílio de um circuito de controle chamado de DMA. A figura 20.09 apresenta uma configuração possível para o acesso de periféricos diretamente à memória do computador.

Um exemplo interessante de DMA é o GPU Direct, uma tecnologia para interação direta da GPU com a memória de sistema
2.4. Direct Cache Access
Pesquise sobre o processador Xeon E5 2600 e sobre a maneira como ele disponibiliza acesso direto para o cache L3 para alguns dispositivos periféricos específicos.
3. Timer - um tipo particular de periférico
O timer é um tipo de periférico bastante particular e comumente utilizado em microcontroladores. Considere a figura 20.10, que apresenta um contador de 4 bits assíncrono.

Este contador é capaz de contar de 0 até 15. Imagine que utilizamos ele com um sistema cujo clock é de exatamente 1Hz. O que isso significa? Que o contador demora 15 segundos para terminar a sua contagem. Imagine, agora, que fosse possível pré-carregar esse contador com o valor 12. Isso significa que o contador passaria a demorar apenas 3 segundos para chegar ao final da contagem. Imagine, agora, que equipamos esse contador com um flag de estouro de contagem. Pronto, esse é o principio de funcionamento de um timer simples.
A figura 20.11 mostra de forma resumida o contador que descrevi acima.

Para que serve o timer? Simples: imagine, agora, que esse sinal de estouro do timer aciona um flag de interrupção. Pronto, temos um periférico que conseguimos configurar para acionar uma interrupção com um intervalo fixo de tempo. Se você já usou a função delay, você já usou um timer.
Microcontroladores tipicamente contam com alguns circuitos de timer. A figura 20.12 mostra a quantidade de timers de 64 bits disponíveis em um ESP32.
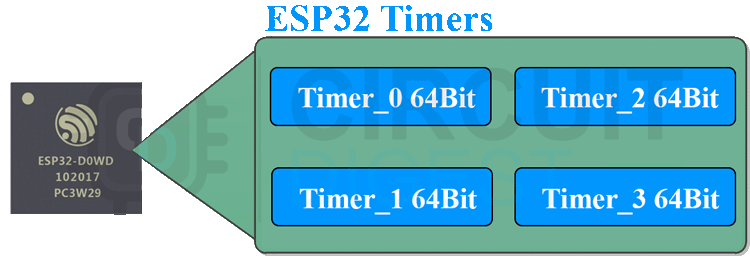
Utilizando um ESP32, configure um dos seus timers para disparar a cada 100ms. Quando esse disparo ocorrer, utilize uma subrotina que envia uma mensagem através da porta serial, a ser lida utilizando um cabo USB.